RECENT RESEARCH BY SANT’ANNA SCHOOL BIOROBOTICS INSTITUTE AND STAZIONE ZOOLOGICA ANTON DOHRN PUBLISHED IN SCIENCE ROBOTICS FINDS NEW WAYS TO PROTECT MARINE ECOSYSTEM. CRAB ROBOT SILVER 2 CAN START TO INTERACT WITH THE UNDERWATER ENVIRONMENT
The Crab Robot SILVER 2 will be able to move and walk on the seabed. It can learn and adapt for a safe interaction with the underwater habitat. It will not add damage to the marine environments that are already exposed and vulnerable to plastic pollution. It will move towards its intended target without causing adverse effects on the marine ecosystem.
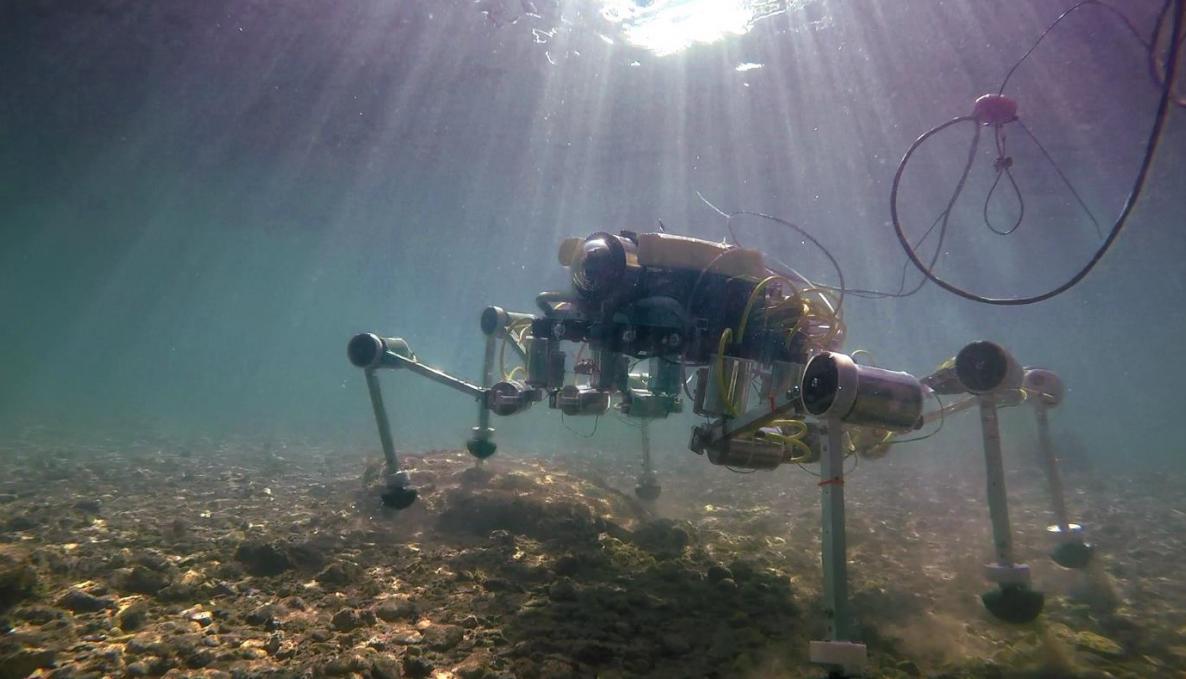
A recent study published in Science Robotics journal and coordinated by the Biorobotics Institute at Sant’Anna School - Pisa in partnership with the Stazione Zoologica Anton Dohrn – Napoli, shows that SILVER 2, drawing inspiration from benthic animals such as crabs, can use legged locomotion to move dexterously on the seafloor, anchor to underwater structures, and ultimately remove plastic waste found on the sea floor.
Benthic and dynamic (hopping) locomotion will be performed by robot SILVER 2 through open loop control algorithm. The robot has been designed for underwater applications by a research team under the supervision of Marcello Calisti, a researcher at the Institute of Biorobotics, building on the pioneering work conducted by Cecilia Laschi in soft robotics. As a major advance in legged locomotion thanks to ultra-flexible materials and actuators changing the stiffness for higher energy efficiency in locomotion, SILVER 2 will be able to sense the objects it handles and distinguish between different metal, plastic, and other objects or living organisms such as fish or corals. Calisti and the research team focused on the SILVER six-legged robot with active hopping behaviors when adapting to the underwater context also preventing organisms from being harmed.
“SILVER 2 is a teleoperated robot system equipped with temperature and pressure sensors – said PhD student Giacomo Picardi, as the first author of the paper– that allows the (human) operator to direct the robot’s locomotion.” Funded by Arbi Dario S.p.A. and National Geographic Society, SILVER 2 has been developed in the Lab. Centro di ricerca sulle tecnologie del mare e la Robotica marina, to operate adaptively in unstructured environments. In particular, SILVER 2 is designed to integrate soft manipulators (a robot arm with soft grippers) for safe interaction in underwater operations.
“Our long-term goal is to expand the exploration capabilities of underwater robots – said Marcello Calisti – As robots get deeper in the sea, they interact with the environment moving to the different areas where they can collect plastics or explore the sea floor. Studying the human interaction with the sea is critical for the sustainability of marine ecosystems that are degraded by human waste and pollutants from oil and mining. Therefore, we work with marine biologists, geologists and oceanographers using a collaborative approach for pollution prevention and control.”
“This collaborative, ‘bioinspired’ and 3-D vision-based approach is aimed at exploring the natural dynamics of the soft systems. Current results allow operators to enable the utility of switching modes in a realistic scenario – explains Sergio Stefanni, a researcher at the Stazione Zoologica Anton Dohrn – Addressing the biodiversity issue, SILVER 2 can investigate deep-sea biodiversity and benthic biodiversity variations form the sampling stations. As biodiversity and ecosystem are considered a top priority for all sectors, monitoring biodiversity, and reducing marine pollution will lead to economic growth and improved quality of life. The next generation of robots will autonomously navigate, collect plastic waste and remove marine litter.”


